|
Zihan (Kevin) Yang I am a master's student at the School of Aeronautic Science and Engineering, Beihang University, China, supervised by Prof. Kexin Guo, Prof. Xiang Yu and Prof. Lei Guo. In 2023, I received a dual bachelor's degree in Materials Science and Engineering, awarded jointly by Northwestern Polytechnical University (China) and Queen Mary University of London (UK). With a background in materials science and aerospace engineering, my current research focuses on robotics, especially where control meets learning. My goal is to develop generalizable solutions that allow robots to adapt seamlessly to varied tasks and environments. CV / Github / ORCID / Research Statement Email: snrt_zzhan@buaa.edu.cn |
|
 Zihan Yang 杨子涵
Zihan Yang 杨子涵
Research
My research has covered both learning-based planning and control, and control-theoretic methods to improve learning.
|

|
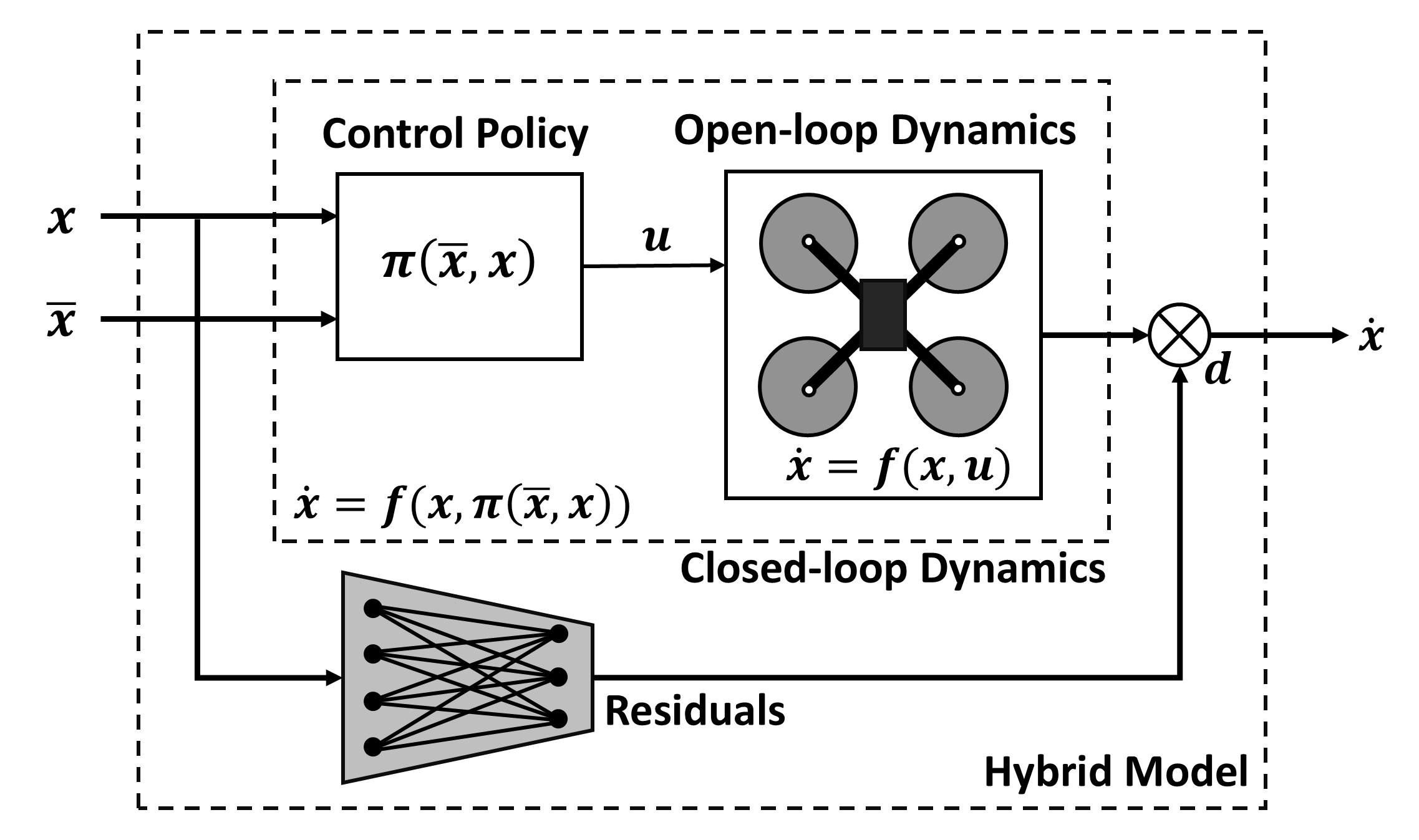
Unified Meta-Representation and Feedback Calibration for General Disturbance Estimation
Zihan Yang Jindou Jia, Meng Wang, Yuhang Liu, Kexin Guo, Xiang Yu. Under Review. project page A meta-adaptation framework for predicting general non-structural disturbances, followed by feedback-calibrated online adaptation to estimate model parameters with attenuation on learning residuals. |
|
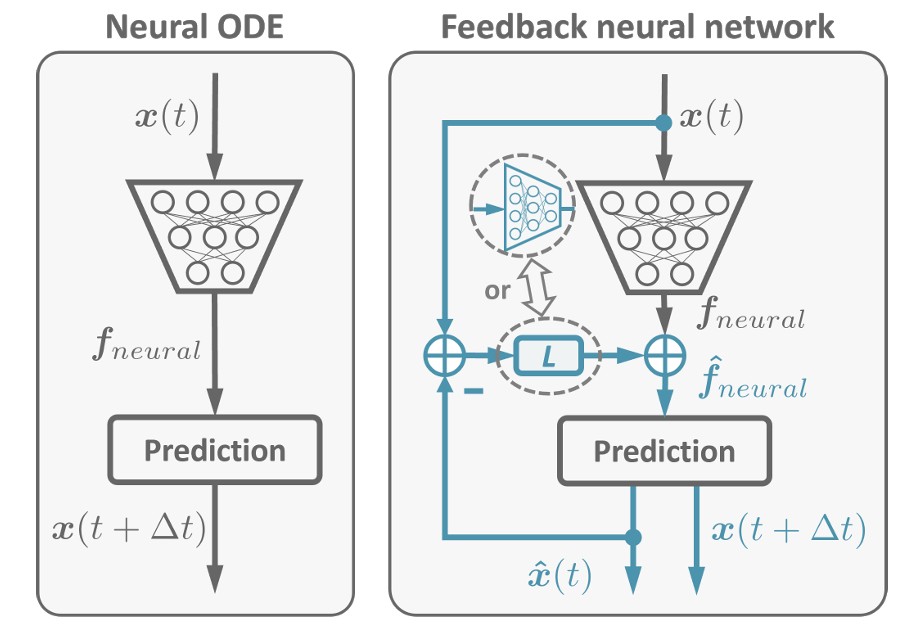
Feedback Favors the Generalization of Neural ODEs
Jindou Jia*, Zihan Yang*, Meng Wang, Kexin Guo, Xiang Yu. International Conference on Learning and Representation (ICLR) 2025 Oral Presentation project page / arXiv / code Feedback neural network improves the generalization of neural ODE through real-time state-feedbacks in continuous-time tasks. |
|
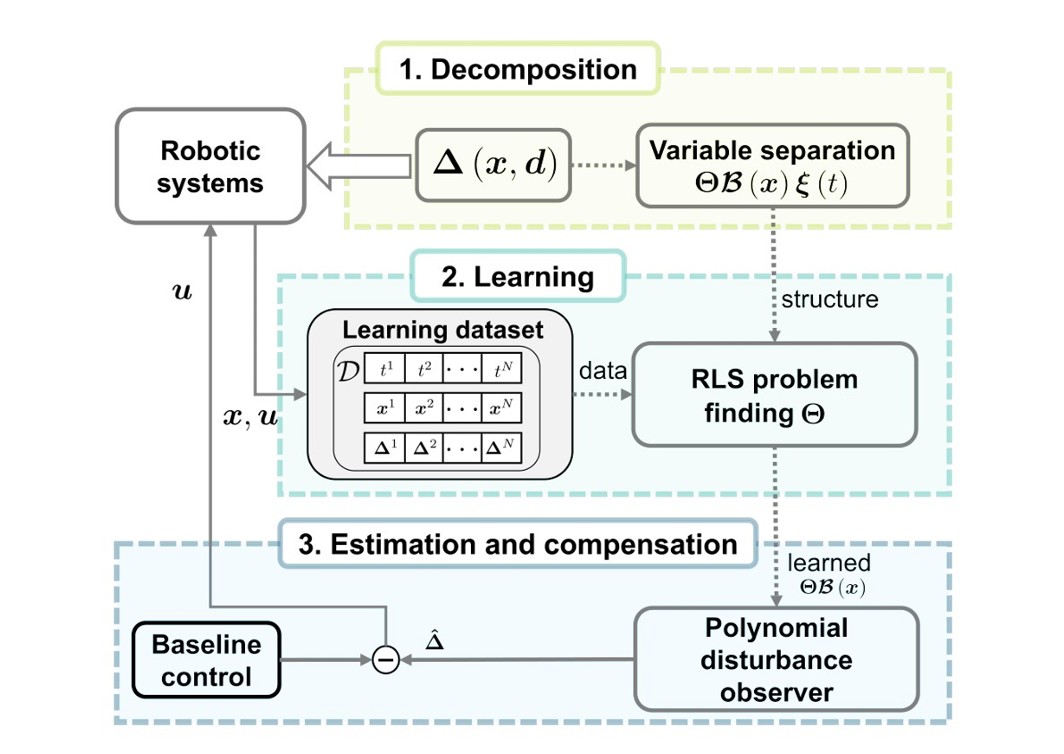
Learning-based Observer for Coupled Disturbances
Jindou Jia*, Meng Wang*, Zihan Yang, Bin Yang, Yuhang Liu, Kexin Guo, Xiang Yu. arXiv Decoupling the disturbance into a state-coupled part and an external-input-related part using Chebyshev polynomial approximation. Online learning of the disturbance model by estimating the external-input-related part. |
|
Optimizing Control-Friendly Trajectories with Self-Supervised Residual Learning
Kexin Guo*, Zihan Yang*, Yuhang Liu, Jindou Jia, Xiang Yu. IEEE Transactions on Automation Science and Engineering (TASE) 2025 An approach for taming model uncertainties through minimizing the residual dynamics via trajectory optimization. |
|
TRACE: Trajectory Refinement with Control Error Enables Safe and Accurate Maneuvers
Zihan Yang, Jindou Jia, Yuhang Liu, Kexin Guo, Xiang Yu, Lei Guo. IEEE International Conference on Control and Automation (ICCA) 2024 Best Student Paper Award IEEE Xplore A closed-loop trajectory refinement method for quadrotors utilizing the differential-flatness property, enabling safe and accurate maneuvers without controller fine-tuning. |
|
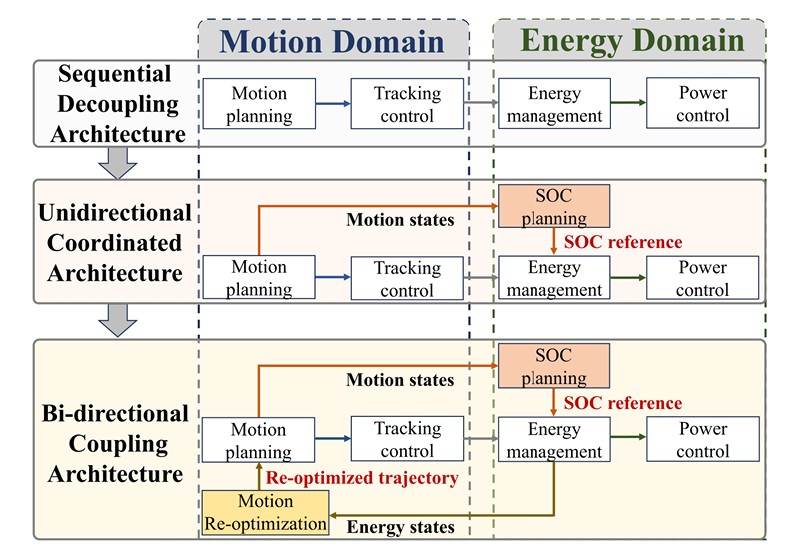
Co-Optimization of Motion and Energy Domain for Hydrogen-Powered Hybrid UAVs: A Bi-Directional Coupling Architecture
Xiaowei Song, Xiaoyu Guo, Guowei Liu, Zihan Yang, Lu Liu. IEEE International Conference on Control and Automation (ICCA) 2025 IEEE Xplore A Motion-Energy co-optimization architecture for hydrogen-powered hybrid UAVs. |
ProjectsThe projects I have worked on, from undergrad to now. |
|
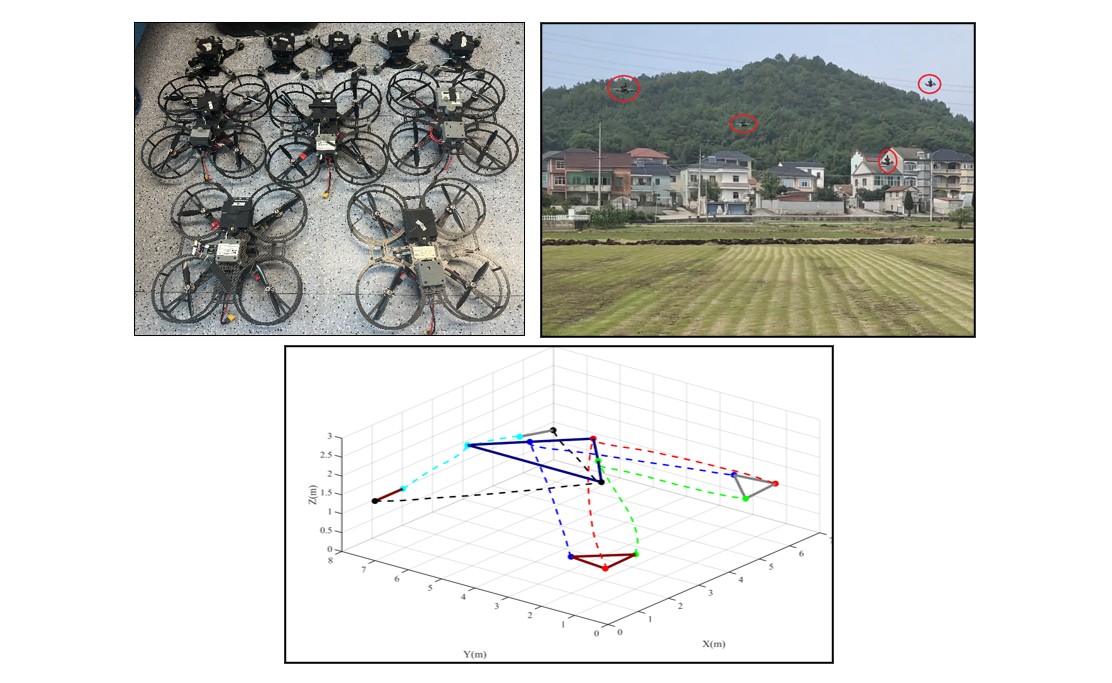
Sucessive Convexification-based Planning and Disturbance-Aware Tracking Control
of Quadrotor Swarms
2024 Mutli-agent planning and tracking control for formation of quadrotor swarms under wind disturbances. Successive convexification is employed to optimize collision-free swarm trajectories, and a disturbance observer-based controller is designed for trajectory tracking. |
|
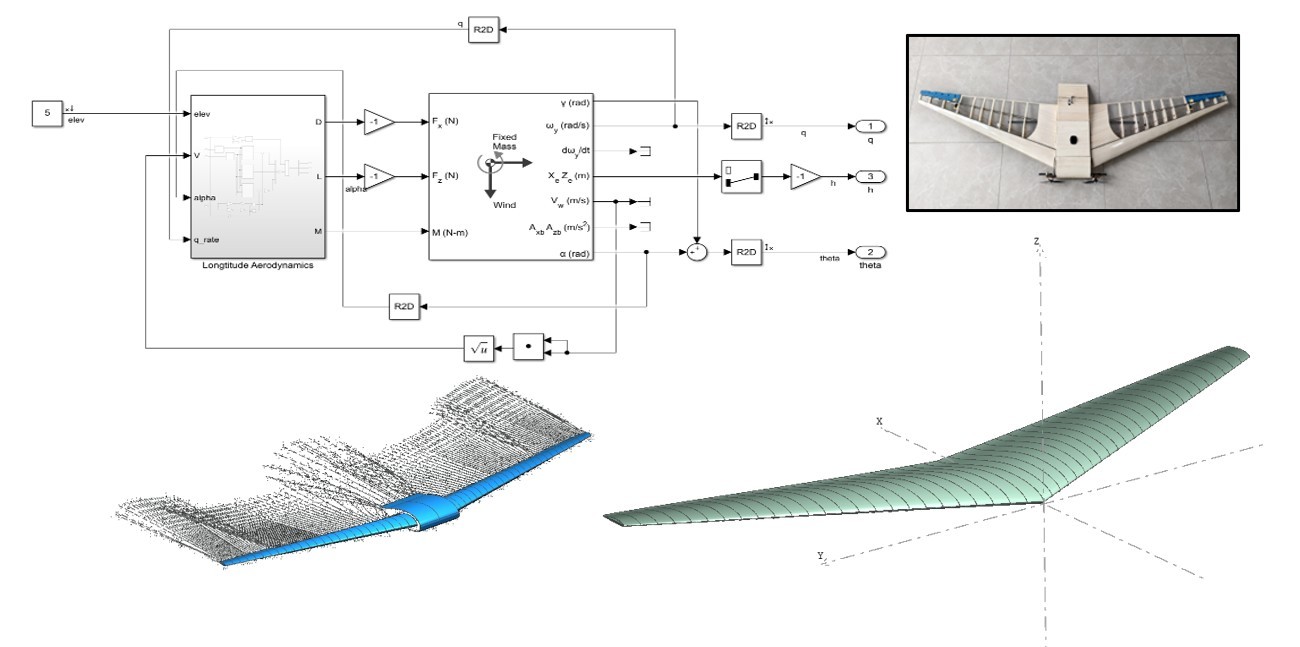
Design and Control Synthesis of a Flying-Wing UAV
2024 A Prandtl wing UAV with high lift-to-drag ratio and long endurance is designed and prototyped. The longitudinal and lateral-directional dynamics are modeled and analyzed, followed by control synthesis with LQR. A PID controller on the two propellers' differential thrust is designed to stabilize the dutch-roll mode. |
|
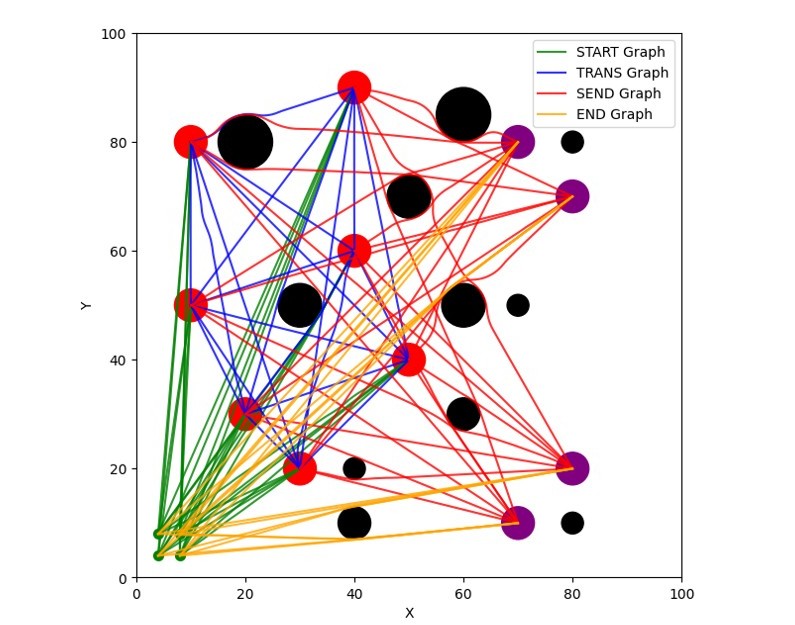
Graph-based Multi-Robot Planning for Last-Mile Delivery
2023 A graph-based framework for multi-robot task allocation and trajectory planning in last-mile delivery scenarios. The pathways are computed by solving time-optimal trajectory optimization problems, and the task allocation is solved via dynamic programming. |
|
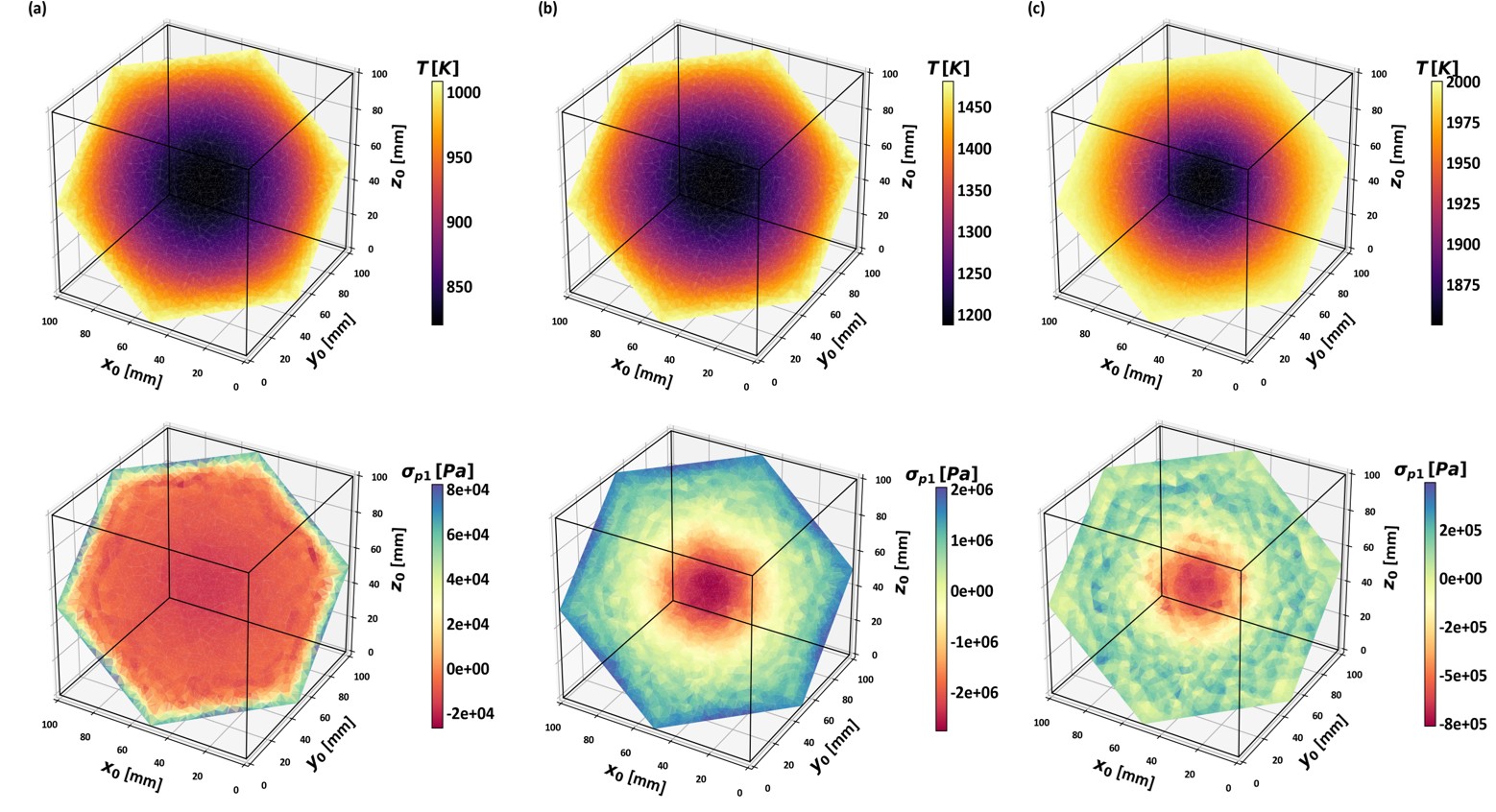
Finite Element Simulation of 3D-Printed Alumina Sintering Process
Undergraduate Thesis Project, 2023 A numerical study on the effect of temperature gradient in large and porous 3D-Prined green body. Porosity and temperature conduction models are coupled and incorporated into the sintering stress model. The coupled model provides an insight for possible sintering stress overload. |
|
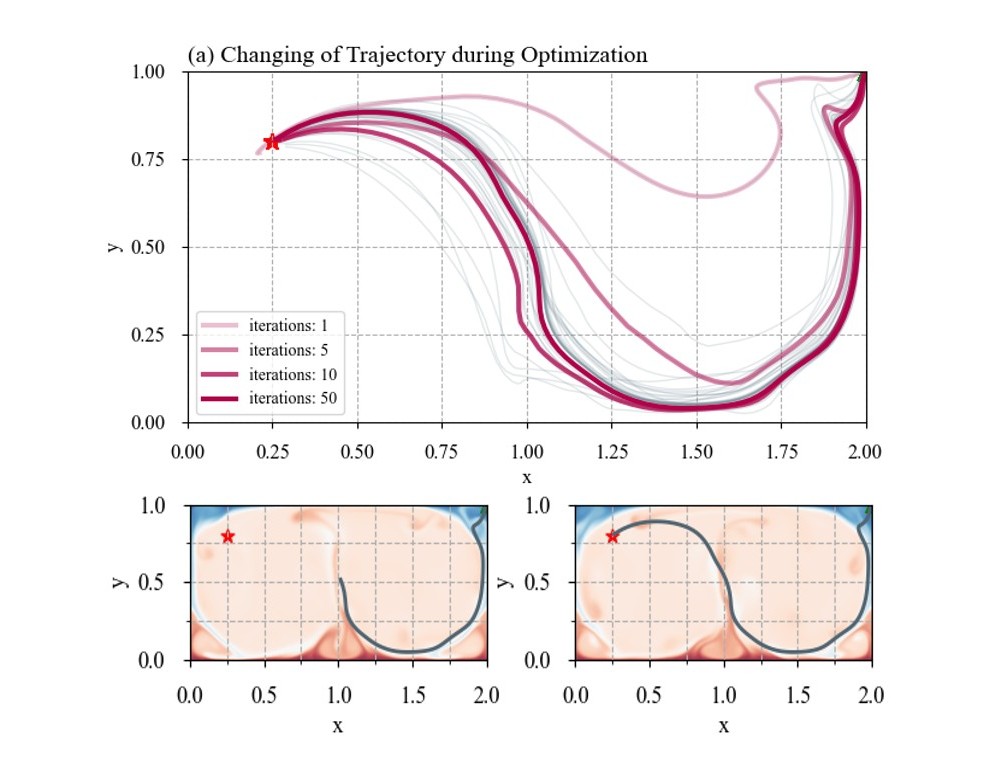
Optimal Transportation in a Rayleigh-Benard Turbulent Flow
2022 Solving an optimal transportation problem in a time-varying Rayleigh-Benard turbulent flow via iterative LQR, with the local jacobians approximated using second-order central finite differences. |
|
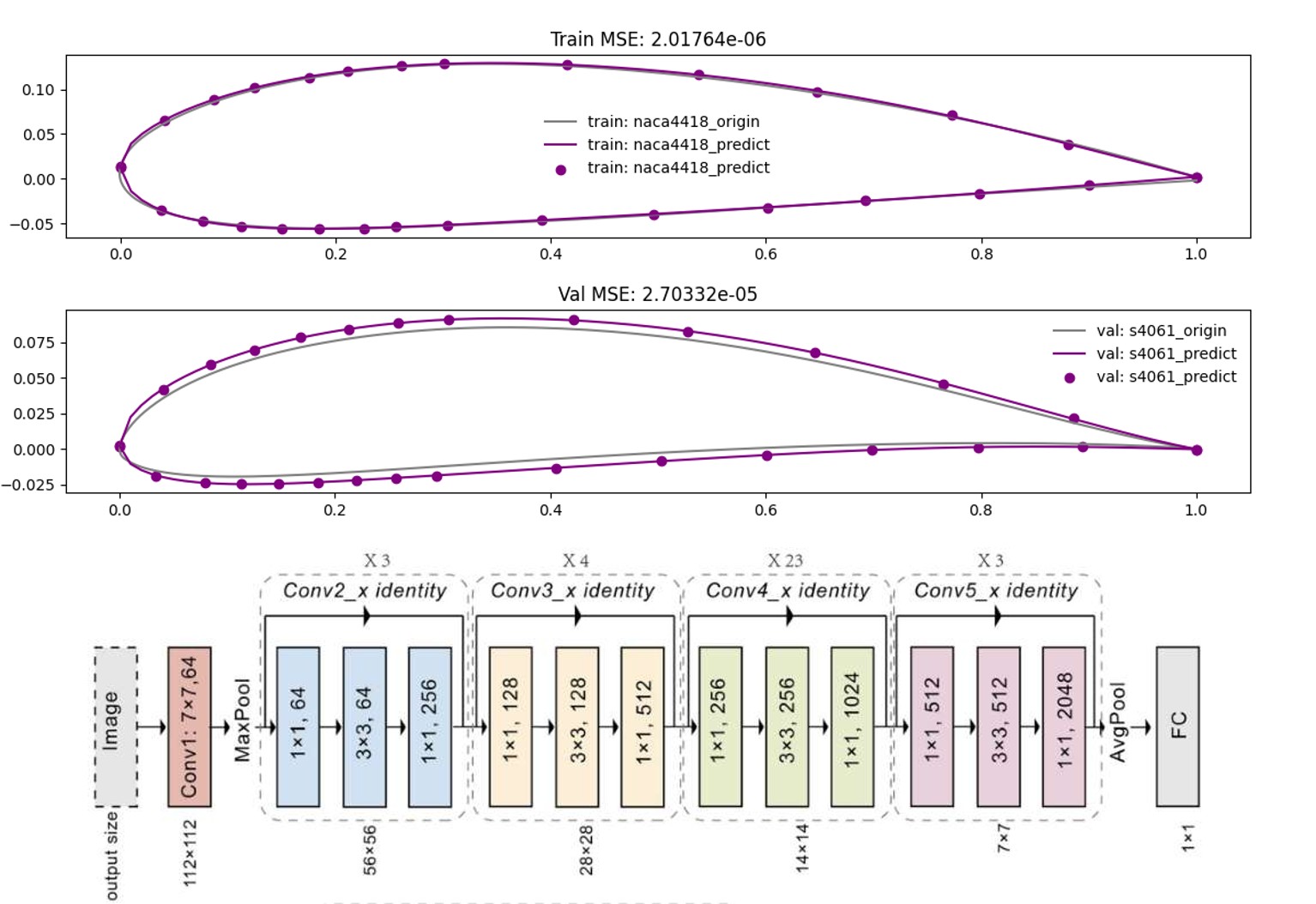
Deep CNN for Airfoil Inverse Design
Rapid prototyping tool for the university aeromodelling team, 2021 A ResNet-based CNN design for inverse design of airfoils, trained on a dataset of 10,000 airfoils and their aerodynamic properties computed via XFOIL. Given target pressure distribution under certain conditions, the model predicts the most likely airfoil shapes for an initial design. |
|
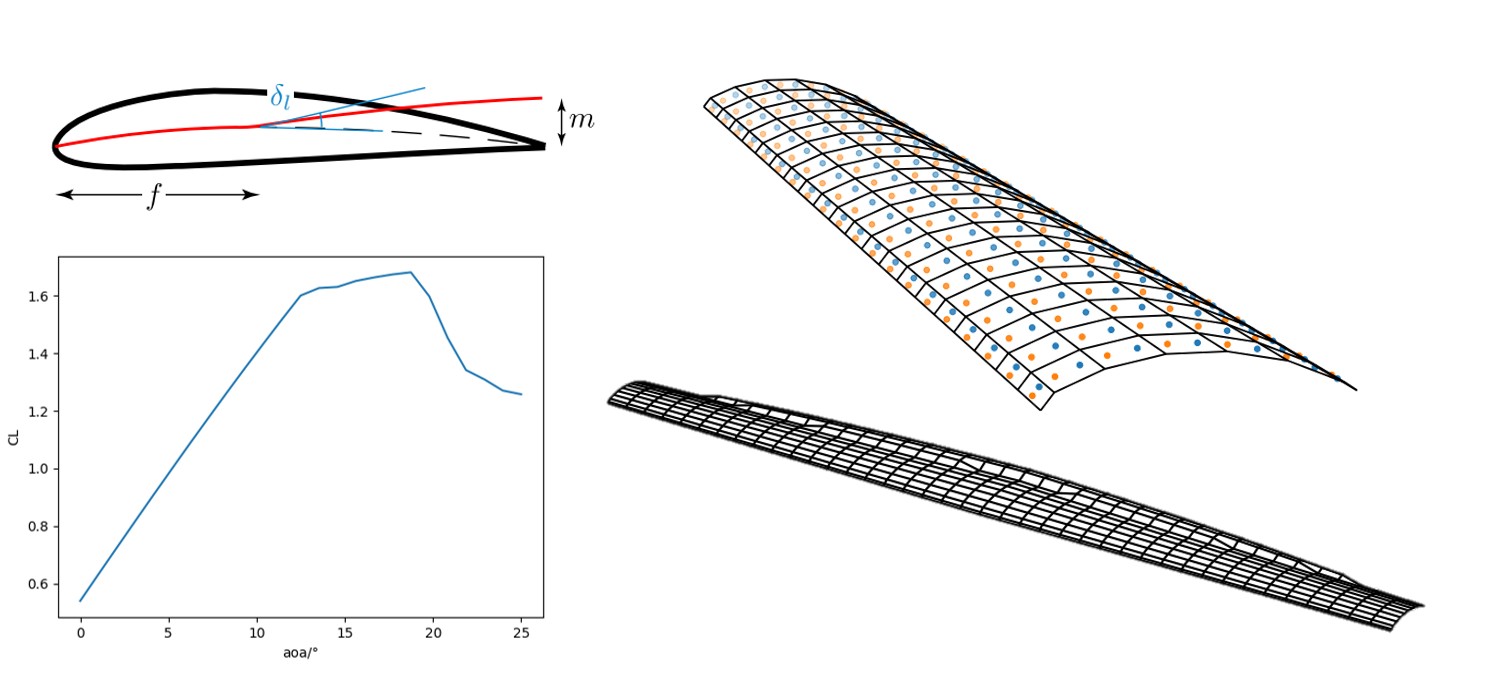
Potential Flow Solver for Lift Coefficient Prediction Under Flow Separation
2021-2022 A solver for lift coefficient prediction of wings under flow separation using potential flow theory. The flow separation is captured via CFD, with the loss-of-lift coefficient mapped to a de-cambered airfoil shape under attached flow. This mapping is plugged into the vortex panel method to solve lift coefficient of a wing iteratively. |
|
Design of 16kg-Cargo UAV with High Maneuverability
China Aeromodelling Design Challenge (CADC), 2021 A fixed-wing UAV with a maximum payload capacity of 16kg is designed and prototyped, together with my team. The UAV features a high lift-to-drag ratio and excellent maneuverability, making it suitable for cargo delivery tasks in China Aeromodelling Design Challenge. |
Misc.Beyond work, I enjoy travelling ✈, playing guitar 🎸 and good coffee ☕. |
|
Credits to the website design from Jon Barron. |